GPS无人机集群
Attention
在使用无人机编队套件之前,需熟练掌握无人机单机操作,无人机相关Wiki链接:
P200无人机Wiki : https://www.amovlab.com/document
P450,P600无人机Wiki : https://prometheus-wiki.readthedocs.io/zh_CN/latest/
GPS介绍
GPS指全球定位系统,全球定位系统是一种以人造地球卫星为基础的高精度无线电导航的定位系
统,GPS在我们生活中比较常见,在汽车以及手机等物品上经常使用,在无人机中,GPS也是作为室外飞行经常使用的定位来源,对无人机来说,虽然精度不高,但成本较低,并且模块较小,在全球范围内都能提供一个较好的定位数据。
GPS无人机集群介绍
GPS作为无人机最常用的定位模块,具有低成本,无人机一体化等优点,用作室外的无人机集群
飞行是非常合适的,因室外飞行区域比较大,所以在通信模块上我们选用了传输距离更大以及带宽更大的图数传模块。
货物验收
客户拿到全部的货物之后,应按照硬件清单一一检查各硬件模块的数量以及是否存在损坏异常
等。
集群飞行功能(旧版)
Attention
在2021年9月我们对GPS无人机集群功能进行了升级,增添了无人机位置差值纠偏功能, 用户可在使用时不严格按照无人机排序进行摆放,在此之前的用户可继续沿用旧版功能, 如需升级到新版,请联系我们的售后工作人员。新版功能操作请浏览集群飞行功能(新版部分)
操作步骤:
1. 打开电源,给地面端电脑,图数传基站等模块进行供电;
2. 将无人机按要求摆放:
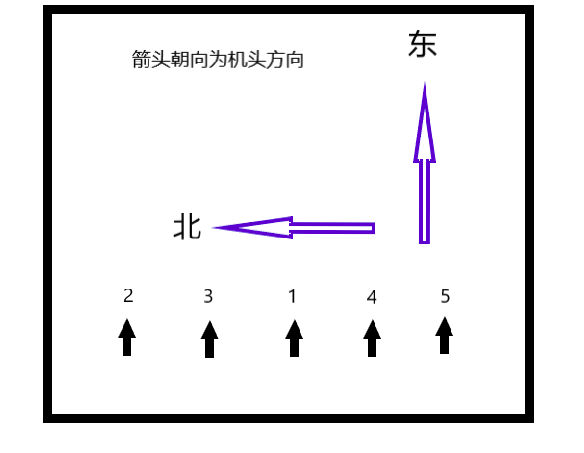
Hint
1、无人机从北到南依次摆放2,3,1,4,5号无人机;
2、无人机机头方向应朝向东方;
3、无人机间隔距离尽量保持两米以上。
3. 先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
4. -将1号无人机上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的 formation_gps.sh 文件,确认各个节点启动正常后,上电启动2,3,4,5号无人机;
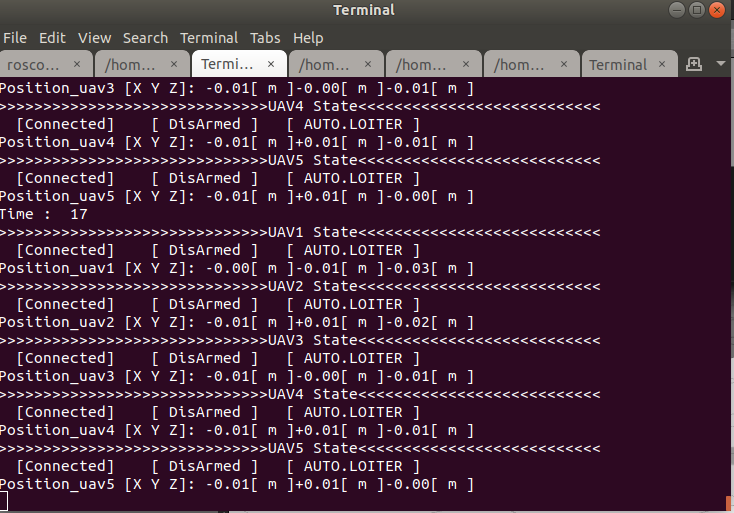
5. 在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
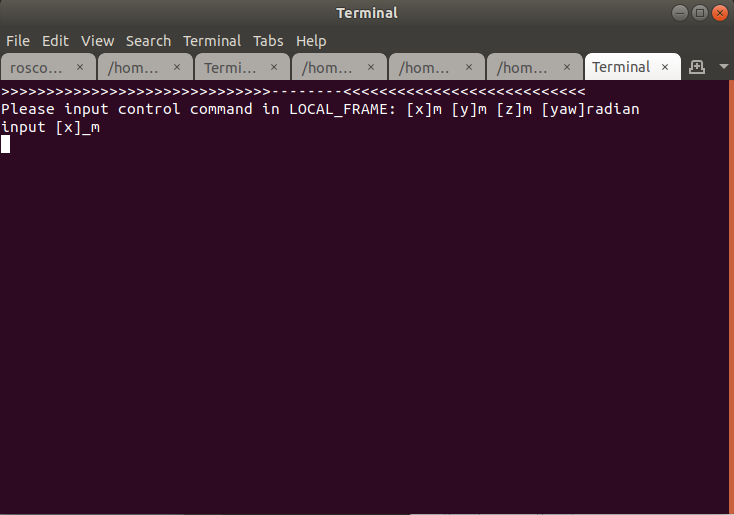
6.在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据;
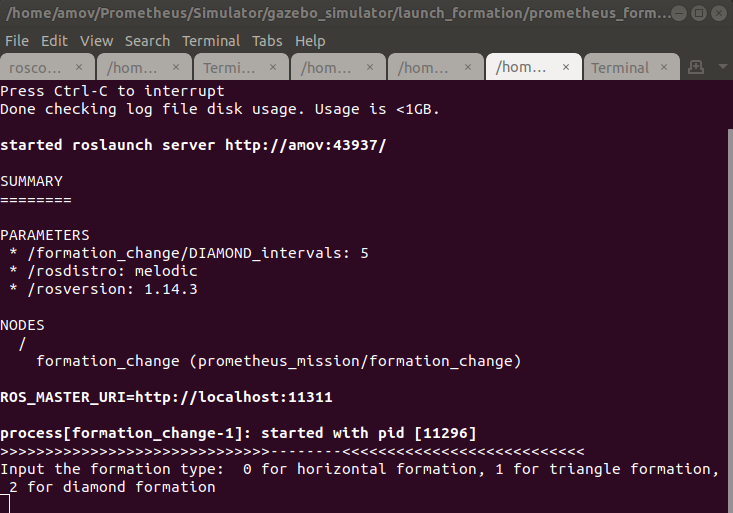
7. 在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);
8. 在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便飞行至目标位置;
9. 用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。
集群飞行功能(新版)
Attention
此处操作步骤说明为2021年9月份之后的新版操作说明,2021年9月份后购买的以及升级后的用户可参考该操作步骤说明操作, 旧版请查看集群飞行功能(旧版)的操作说明。
操作步骤:
1. 打开电源,给地面端电脑,图数传基站等模块进行供电;
2. 将无人机按要求摆放:
Hint
1、无人机从北到南依次摆放2,3,1,4,5号无人机;
2、无人机机头方向应朝向东方;
3、无人机间隔距离尽量保持两米以上。
4、有位置差值纠偏功能,可以不以一字型摆放无人机,上下左右都可以偏移,但需要注意飞机飞行方向不可冲突,否则可能会引起无人机碰撞。
3. 先进行单机定点飞行,确认无人机单机能够正常解锁并能够定点飞行;
4. -将1号无人机上电启动,在地面端电脑上通过NoMachine连接1号无人机的电脑,并启动位于1号机电脑桌面的 formation_gps.sh 文件,确认各个节点启动正常后,上电启动2,3,4,5号无人机;
5. 在集群状态节点的终端窗口查看每架无人机的状态,确保没有异常;
在队形切换节点的终端窗口根据提示选择队形(目前仅支持以一字形或三角形起飞,不选择的情况下默认以一字形起飞);
在模式切换节点的终端窗口根据提示输入数字0选择解锁起飞,无人机集群便起飞至预设起飞高度;
8.在位置控制节点的终端窗口中根据提示输入在本地坐标系下的目标位置X,Y,Z(单位为米)以及无人机偏航角(单位为弧度)数据,此时无人机纠偏数据开始生效,无人机将自动纠正位置;
9. 用户可根据个人使用情况按照提示正确输入队形控制,模式控制,位置控制相关指令。