PID调参
PID调节图示
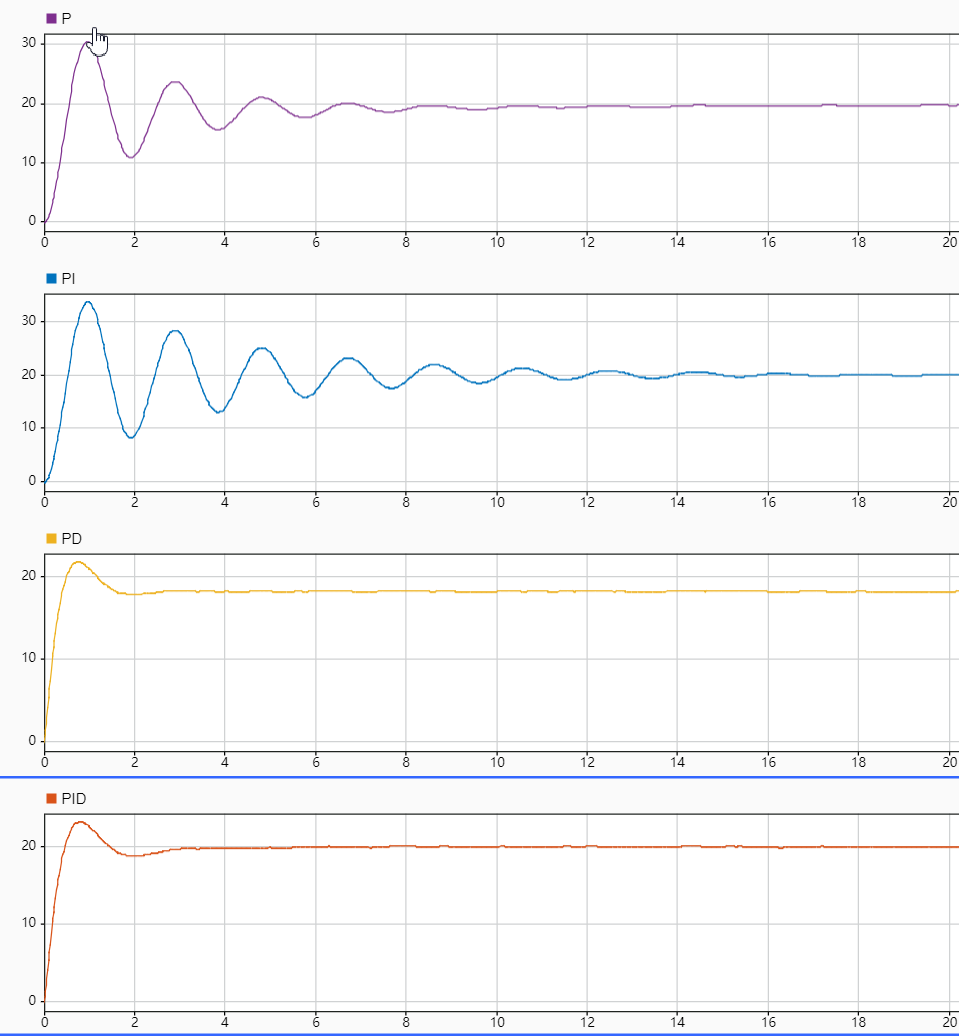
p为比例项、i为积分项、d为微分项。pid调参可用如下一张图来解释说明。 纯比例P作用下在稳定后有些许的静态误差,因此引入积分项I。 PI作用下,虽然弥补了静态误差,但是因为引入了积分项,使得调节过程中振幅增加,调节周期增长,单纯PI作用未免有“因小失大”之疑。 PD作用下,加快了调节时间减小了调节幅度,但是当系统稳定时与输入有较大误差。 综合以上,PID作用下,调节的又快又好还没有误差,因此PID调节是理想的控制调节策略。
参数调节
在调节参数之前,应该了解px4的代码框架,了解位置控制与姿态控制的关系,内环与外环的关系。
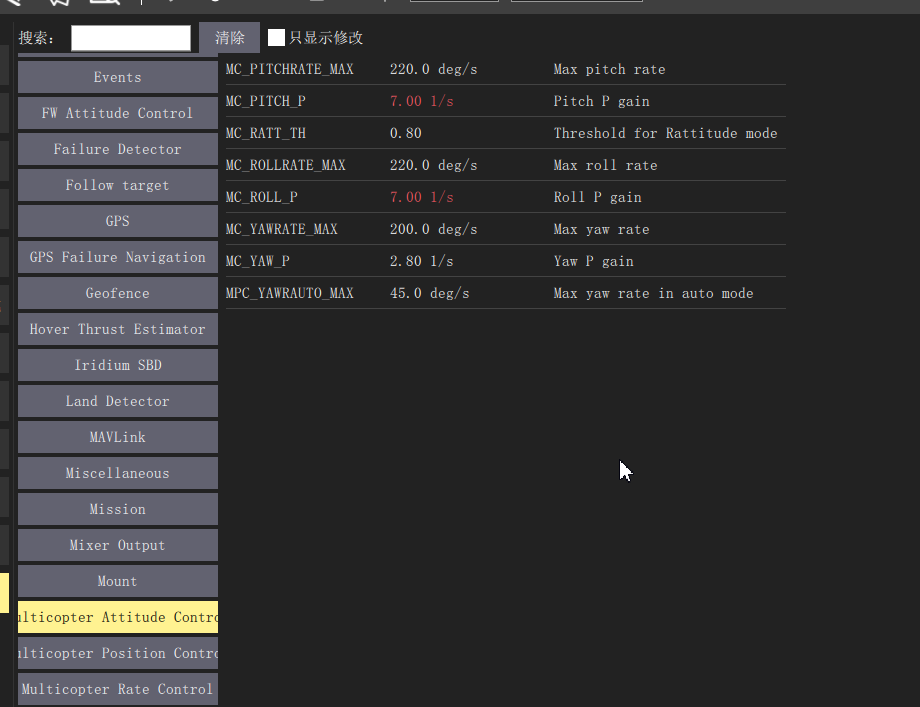
姿态控制的角度环参数
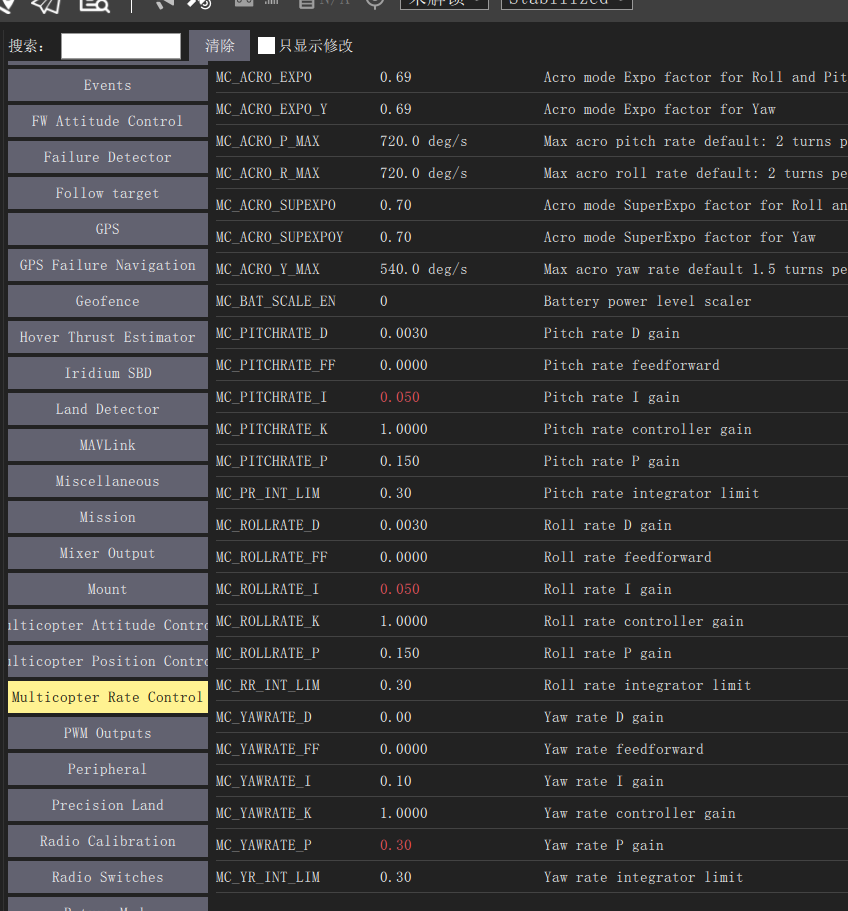
姿态控制的角速度环参数
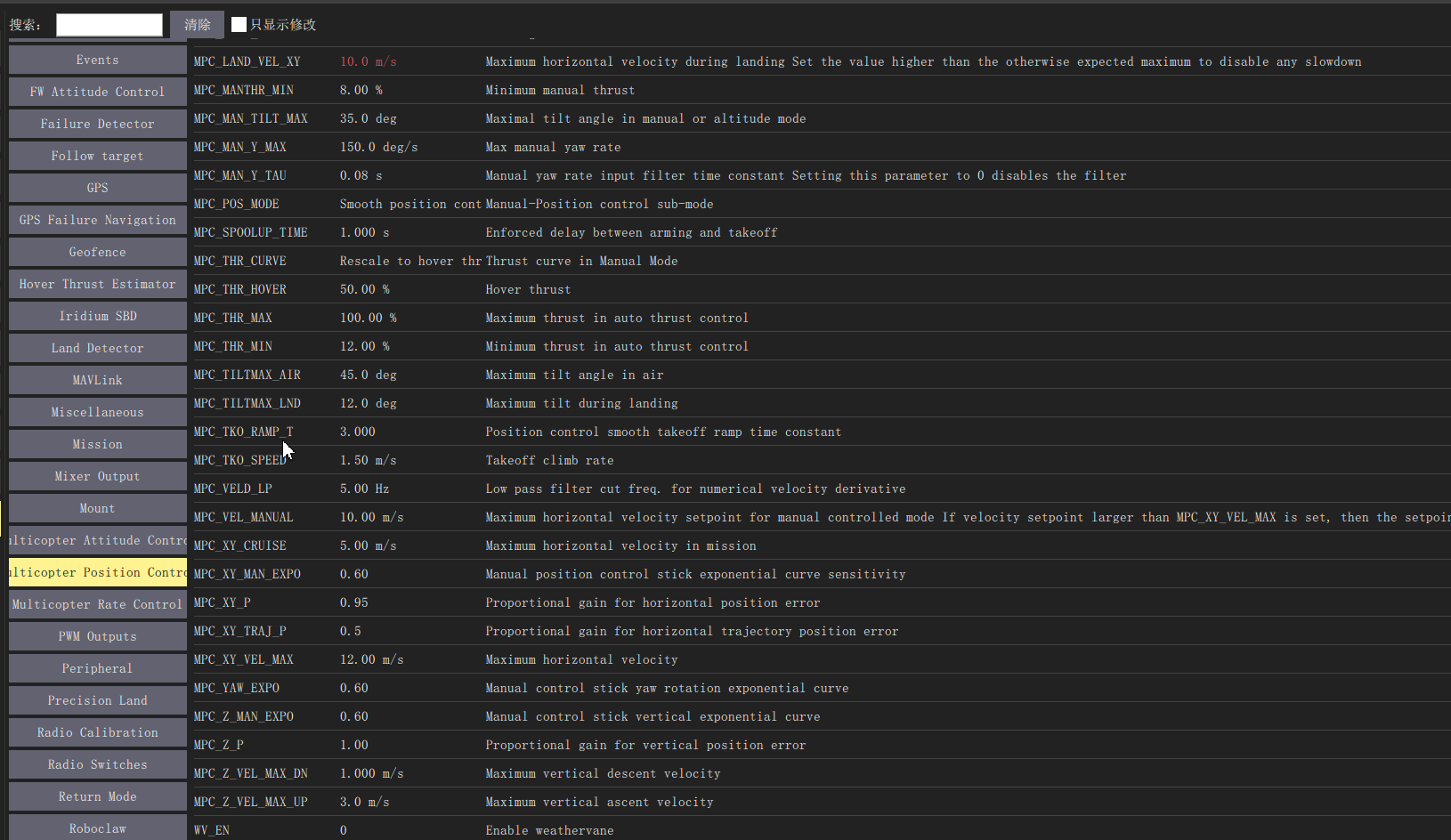
位置控制参数